



USAF contract to Northrop Grumman could improve intelligence gathering through better ‘geo-registration’
Northrop Grumman Corp. has been awarded a phase three navigation system-related contract from the U.S. Air Force Research Laboratory to continue improving geo-registration accuracy for positioning and pointing applications, even in GPS-denied conditions.
In the first two phases of the Maintain Accurate Geo-registration via Image-nav Compensation (MAGIC) program, Northrop Grumman integrated geo‑registration algorithms in a vision-aided inertial navigation system. Having successfully demonstrated a prototype system in phase one and prepared for flight tests in phase two, the company will continue to develop capabilities for incorporating 3-D maps, improving performance and quantifying uncertainties associated with image-based navigation in phase three. Northrop Grumman will also conduct additional test flights to prove real-time performance in realistic environments.
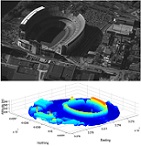
Geo-registration of data is critical for accurate interaction between systems, such as locating targets and handing off coordinates to other aircraft. Geo-registration of images involves pairing unreferenced images with the physical locations or exact coordinates of depicted items. This allows aircraft to create accurate maps by stitching together photos and correlating them with their world-based locations, which is useful for intelligence gathering and targeting.
“We continue to refine our new positioning and geo-registration solution to offer greater situational awareness to warfighters, especially in GPS-denied situations,” said Charles Volk, vice president of the advanced navigation systems business unit at Northrop Grumman.
Partnered with Toyon Research Corp., of Goleta, CA, Northrop Grumman is building on its experience in vision-aided inertial navigation under past programs such as Collaborative Robust Integrated Sensor Positioning, which matched image features and processed visual motion estimations for precise navigation without relying on GPS.
The MAGIC program’s objective is to develop and demonstrate advanced real-time geo-registration and navigation algorithms using a combination of cameras, an inertial measurement unit and any available GPS information. The program aims to capitalize on recent advances in the availability of low size, weight, power and cost camera systems that make the inclusion of camera information in navigation and geo‑registration systems for airborne vehicles a significant opportunity.
Northrop Grumman is a leading global security company providing innovative systems, products and solutions in unmanned systems, cyber, C4ISR, and logistics and modernization to government and commercial customers worldwide.


